输入输出
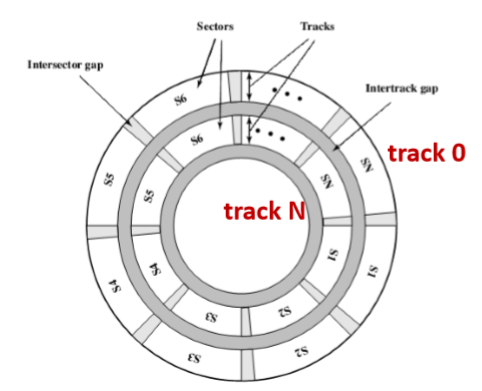
外围设备
输入/输出操作通过连接到输入输出模块的各种外部设备完成,这些外部设备提供了在外部环境和计算机系统之间的数据交换,通常称为外围设备,简称外设
人可读设备:适用于与计算机用户通信
机器可读设备:适用于与设备通信
通信设备:适用于与远程设备通信
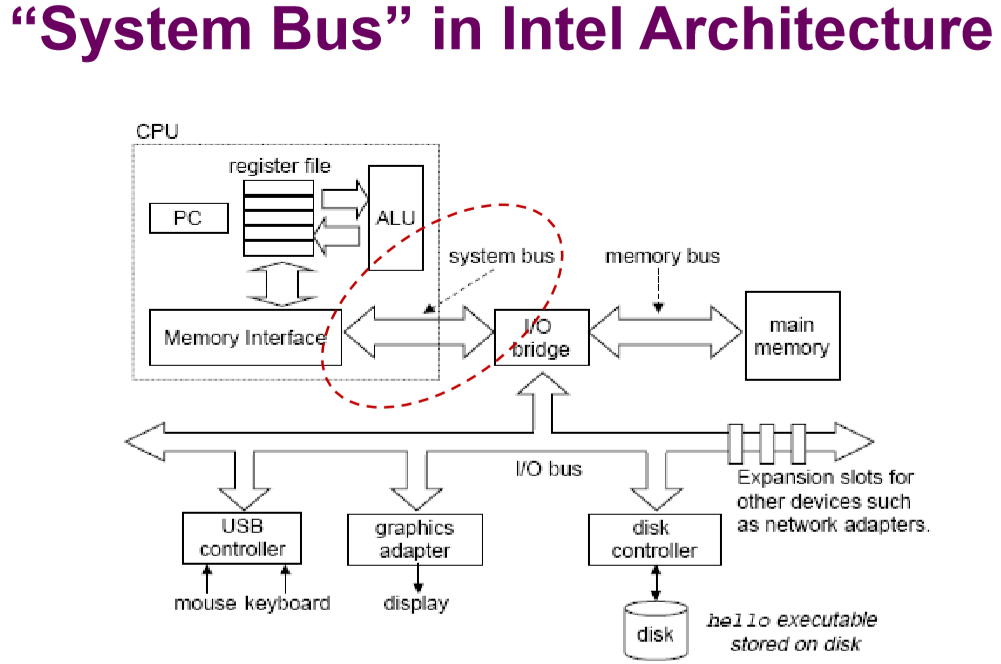
不能将外设直接连接到系统总线上
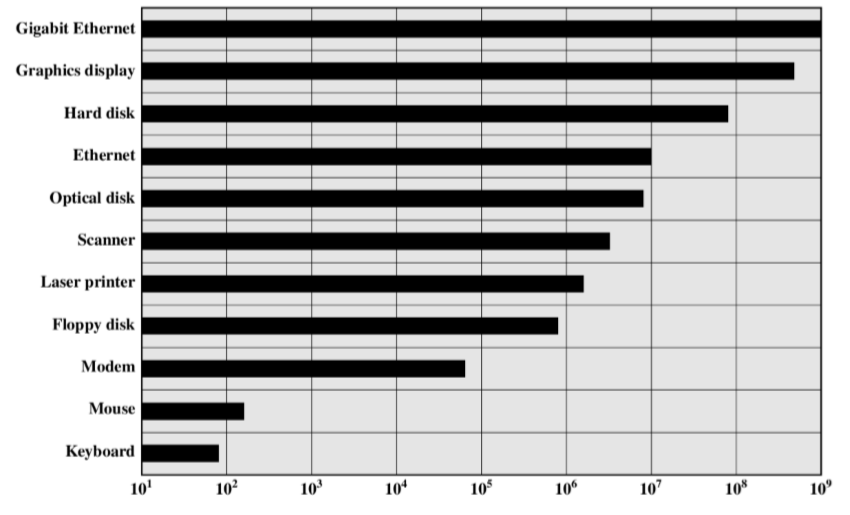
外设的数据传送速度一般比存储器或处理器慢得多
外设使用的数据格式和字长度通常与处理器不同
I/O模块
I/O模块是计算机内部系统和外设之间的桥梁
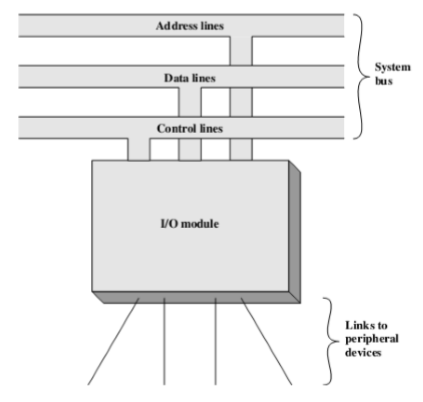
通过系统总线或中央处理器和存储器连接
通过专用数据线与一个或多个外设连接
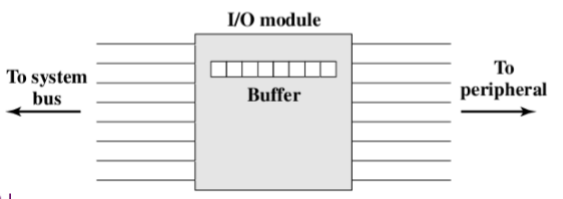
外设接口
I/O模块的接口以控制、状态和数据信号的形式出现
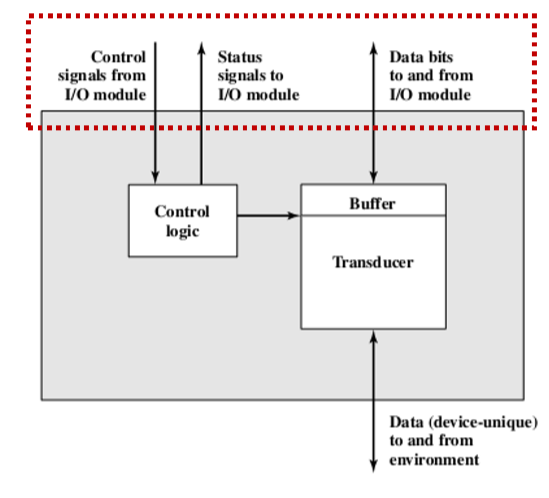
控制逻辑:控制外设的操作,以响应来自I/O模块的命令
缓冲器:缓冲器用于缓存I/O模块和外设之间传送的数据
- 缓冲器的大小一般是8位或16位
I/O模块的功能
处理器通信
命令译码:I/O模块接受来自处理器的命令,这些命令一般作为信号发送到控制总线
数据:数据是在处理器和I/O模块之间经由数据总线来交换的
状态报告:由于外设速度很慢,所以知道I/O模块的状态很重要
地址识别:I/O模块必须能识别它所控制的每个外设的唯一地址
设备通信
通信内容包括命令、状态信息、数据
数据缓冲
外设的数据传送速度一般比存储器或处理器的慢得多
某些外设的数据传送速度比存储器或处理器要快
控制和定时
处理器会非预期的与一个或几个外设进行通信
一些内部资源是被共享的,如主存和数据总线
检错
检错并把差错信息报告给处理器
设备报告的机械和电路故障
传输过程中数据位的变化
I/O模块结构
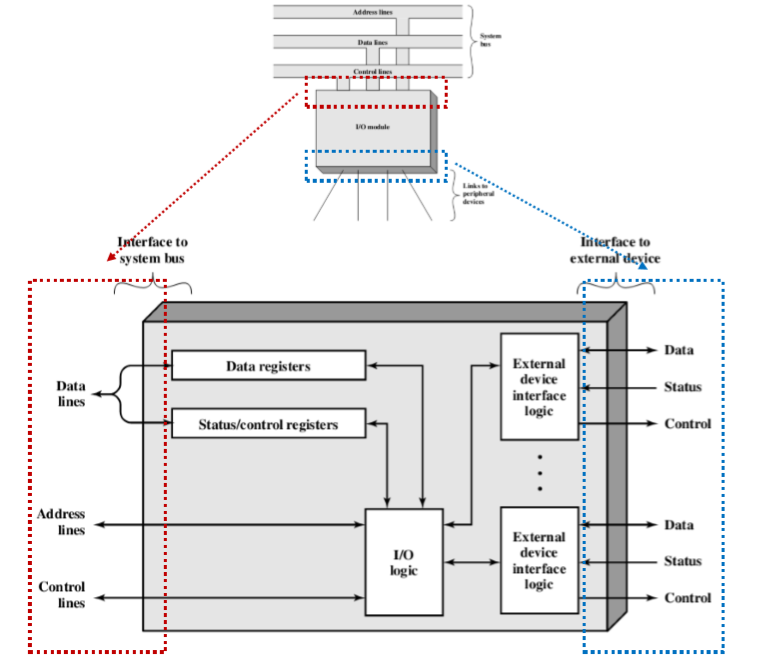
外部接口
并行接口:多跟线连接I/O模块和外设,同时传送多位数据
串行接口:只有一根线用于传输数据,每次只传输一位数据
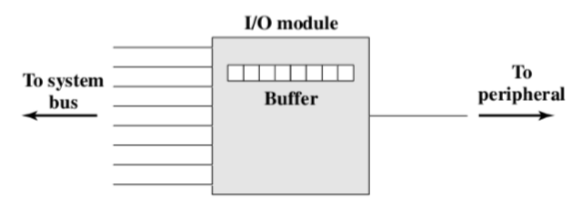
由于并行接口要求每次同时传送,当传输速度和总线长度增加时,总线的时钟频率会受到限制
I/O操作技术
| 传递方式 | 无中断 | 使用中断 |
|---|---|---|
| I/O与存储器之间的传递通过处理器实现 | 编程式I/O | 中断驱动式I/O |
| I/O与存储器直接传送 | 直接存储器存取 |
编程式I/O
处理器通过执行程序来直接控制I/O操作,当处理器发送一条命令到I/O模块时,它必须等待,直到I/O操作完成
中断驱动式I/O
处理器发送一条I/O命令后,继续执行其他指令,并且当I/O模块完成其工作后,才去中断处理器工作
直接存储器读取:
I/O模块与主存直接交换数据,而不需要处理器的干涉
编程式I/O
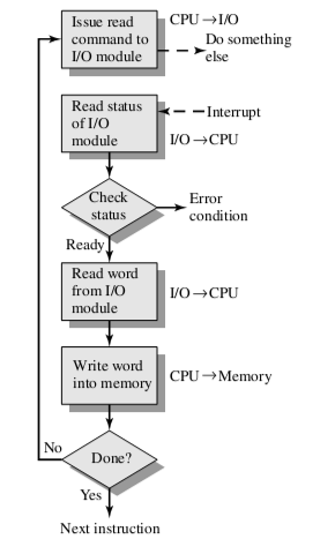
当处理器在执行过程中遇到一条与I/O操作有关的指令时,它通过发送指令到适当的I/O模块来执行这条指令
I/O模块将执行所要求的动作,然后在I/O状态寄存器中设置一些适当的位
I/O不会中断处理器,因此处理器需要周期性地检查I/O模块的状态,直到发现该操作完成
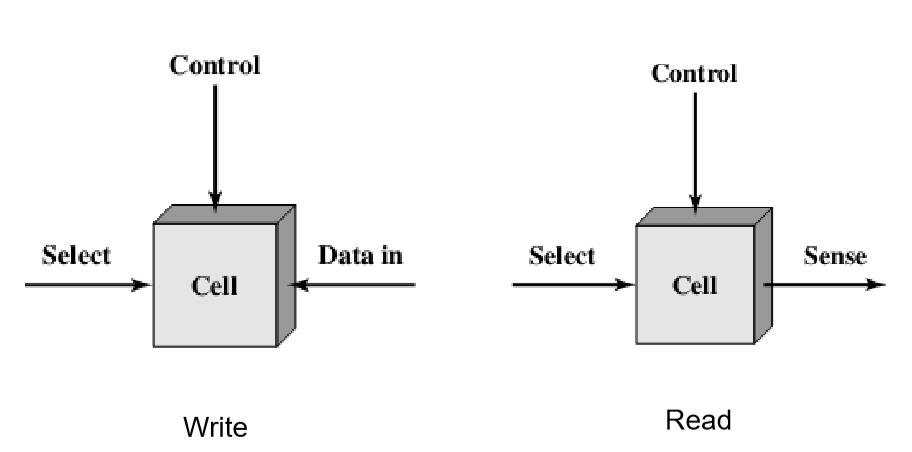
I/O命令
为了执行I/O操作,处理器发送一个指定具体I/O模块和外设的地址,并发送一条I/O命令
控制命令:激活外设并告诉它要做什么
测试命令:测试I/O模块及其外设相关的各种状态条件
读命令:使I/O模块从外设获得一个数据,把它存入内部缓冲区
写命令:使I/O模块从数据总线获得一个数据,把它传入外设
I/O指令
I/O指令很容易映射为I/O命令,并且两者之间通常是简单的一一对应关系
- 指令的形式取决于外设寻址的方式
编制方式:
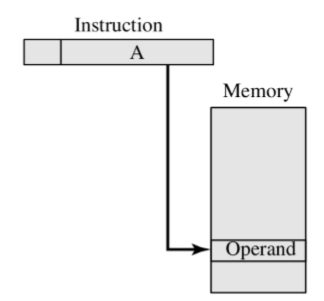
存储器映射式I/O:存储单元和I/O设备有统一的地址空间
- 能用大的指令系统,可进行更有效的编程
分离式I/O:让总线既有存储器的读线和写线,同时也有输入和输出命令线
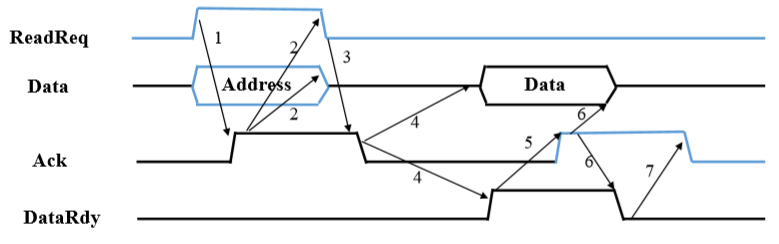
中断驱动式I/O
处理器发送一个I/O命令到模块,然后去处理其它有用的工作
当I/O模块准备和处理器交换数据时,它中断处理器以请求服务
处理器执行数据传送,最后恢复它原先的处理工作
从I/O模块的角度看:
I/O模块接收来自处理器的读命令
I/O模块从相关的外设中读入数据
一旦数据进入I/O模块的数据寄存器后,该模块通过控制总线给处理器发送中断信号
I/O模块等待直到处理器请求该数据时为止
当处理器有数据请求时,I/O模块把数据传送到数据总线上,并准备另一个I/O操作
从处理器的角度看:
处理器发送一个读命令
处理器离开去做其它的事情,并在每个指令周期结束时检查中断
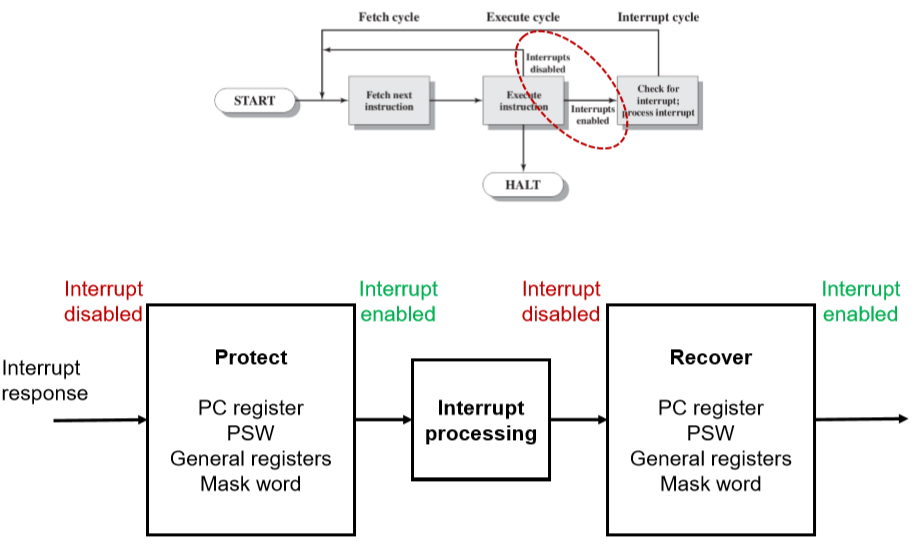
当来自I/O模块的中断出现时,处理器保存当前程序的现场
处理器从I/O模块读取数据字并保存到主存中
处理器恢复刚才正在运行的程序的现场,并继续运行原来的程序
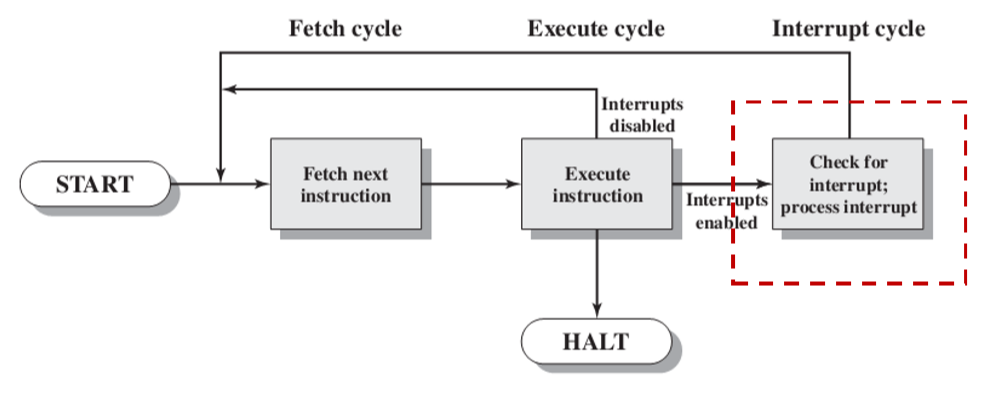
中断禁止和中断允许
中断要把上下文环境放置到栈中
有些正在处理中关于数据读取等操作不可以直接打断
响应优先级和处理优先级
假设响应优先级为 $L_1 > L_2 > L_3 > L_4$,处理优先级为 $L_1 > L_4 > L_3 > L_2$,而 $L_1,L_3,L_4$ 在主程序运行时同时发生了中断请求,而 $L_2$ 的中断请求发生在处理 &L_3& 中断的时候
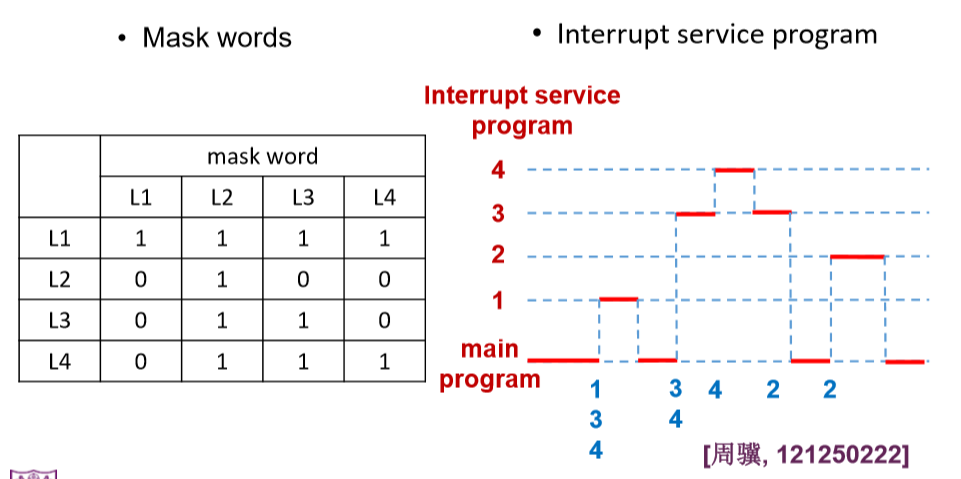
屏蔽字是由处理优先级来进行处理的
每一个都能屏蔽自己
如上的屏蔽字中,行屏蔽列
设备识别
多条中断线:即使有多条中断线可用,每条线上也需要采用其他三种技术中的一种
软件轮询:轮询每一个I/O模块来确定是哪个模块发生的中断
菊花链:所有的I/O模块共享一条中断请求线,中断应答线采用菊花链穿过这些中断模块
独立请求:特定的中断控制器用于解码和分析优先级
分配优先级
多条中断线:处理器仅仅挑选具有最高优先级的中断线
软件轮询:模块的轮询次序就决定了模块的优先级
菊花链:链接模块次序就决定了模块的优先级
独立请求:中断控制器决定
直接存储器存取
无需经过处理器即可访问内存的模块
不足:
I/O传输速率受处理器测试和服务设备的速度限制
处理器负责管理I/O传送,对于每一次I/O传送,处理器必须执行很多指令
DMA模块
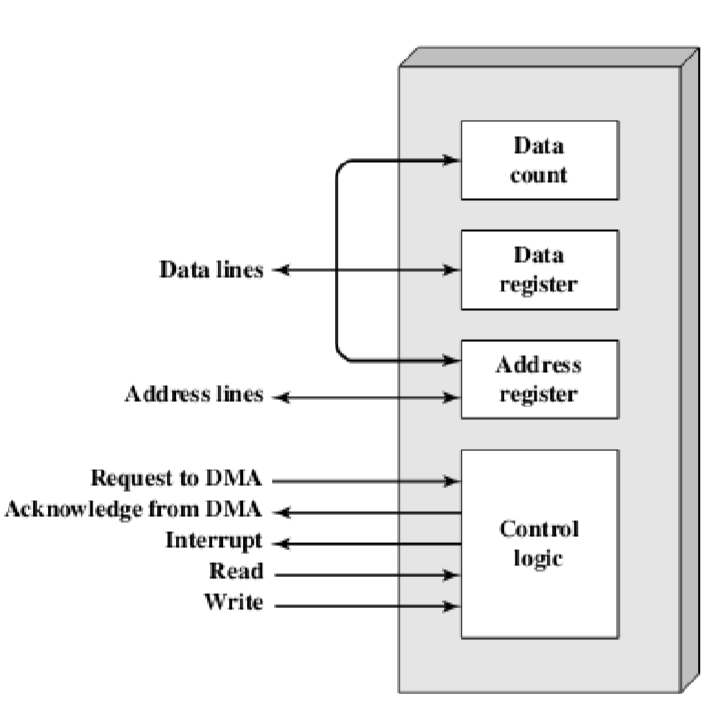
处理器通过发送以下信息向DMA模块发出命令:读/写、I/O设备地址、内存中的起始位置、字数
处理器继续进行其他工作
DMA模块将全部数据块,每次一个字,直接将数据传输到存储器或从存储器读出,而无需经过处理器
当传输完成时,DMA模块向处理器发送一个中断信号
内存权限
CPU停止法
优点:控制简单
缺点:影响CPU,没有充分利用内存
适用:高速I/O设备的块传输
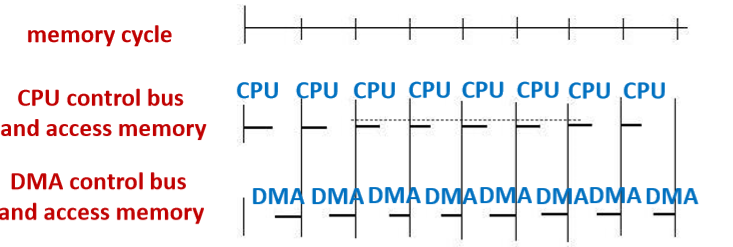
周期窃取
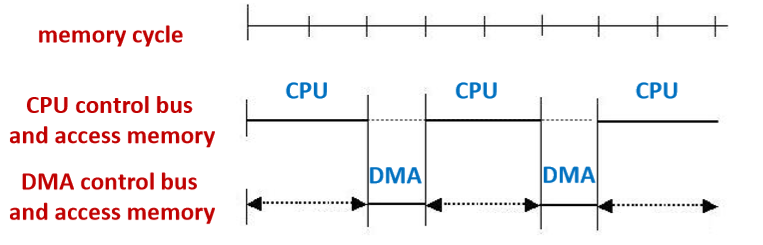
优点:充分利用CPU和内存,及时响应I/O请求
缺点:DMA每次都请求总线
适用:I/O周期大于存储周期
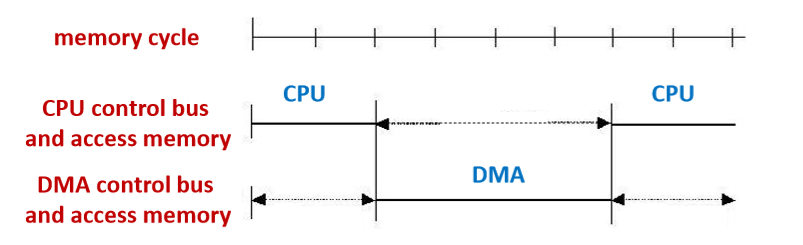
交替分时访问
优点:CPU未停止或等待,DMA不请求总线
缺点:CPU周期大于存储周期
DMA配置机制
单总线分离DMA
所有模块共享相同的系统总线
DMA模块使用编程式I/O,通过DMA模块在存储器和I/O模块之间交换数据
- 便宜但低效
单总线集合的DMA-I/O
DMA逻辑实际上可能是I/O模块的一部分,也可能是控制一个或多个I/O模块的单独模块
- 减少周期数
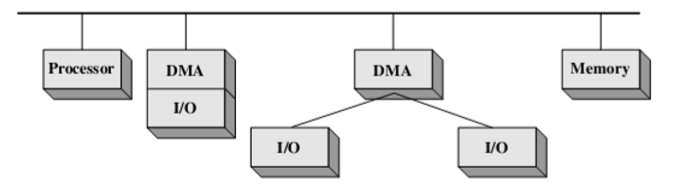
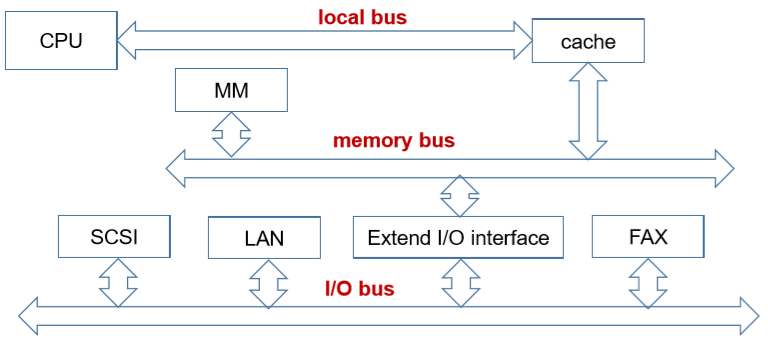
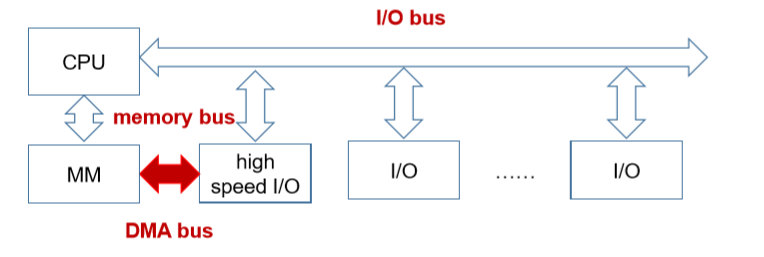
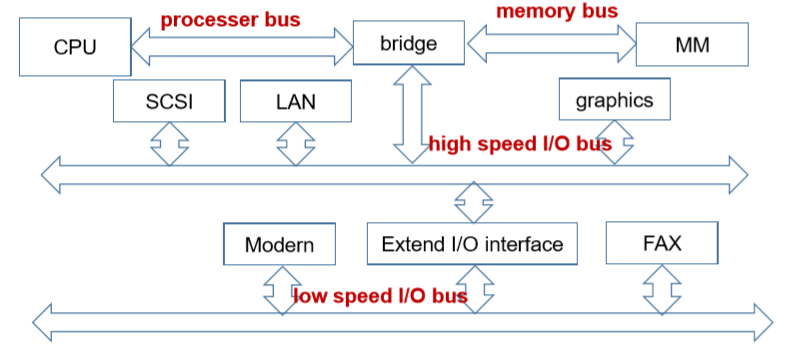
I/O总线
使用I/O总线将I/O模块连接到DMA模块
- 多个I/O模块共享DMA,且容易扩展
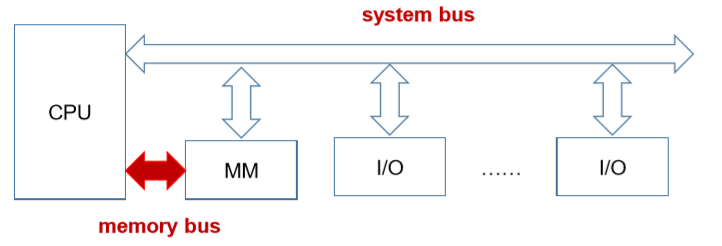
I/O模块的演变
CPU直接控制外设
增加控制器或I/O模块,CPU使用编程式I/O,将CPU与外围设备的细节分离
采用中断,CPU无需花费时间等待外围设备就绪
I/O模块可通过DMA直接存取存储器,无需CPU负责存储器和I/O模块之间的数据传递
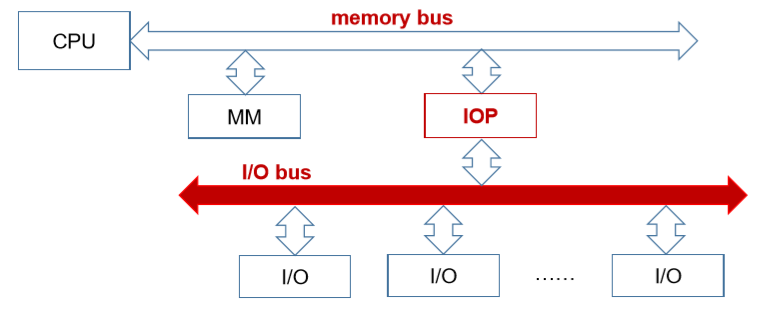
I/O通道:I/O模块有自己的处理器,带有专门为I/O操作定制的
指令集- CPU指示I/O通道执行存储器中的I/O指令,只有在执行完成后才会中断CPU
I/O处理器:I/O模块有一个局部存储器,I/O模块成为一个自治的计算机,常用于与交互式终端进行通信
- 只需最少的CPU参与即可控制大量I/O设备